机器学习
面试
web
binder协议
数据标注
ROS
大端
PORT和PID区别
遥感数据处理
汇编语言
网络编程
几何
可视化
网页数据抓取软件
单机版聊天室
go build
word2vec
AsyncSequence
划分
案例
相机标定
2024/4/12 20:31:43【MQ笔记】张氏标定法学习笔记:A Flexible New Technique for Camera Calibration详解
张定友教授于2000年发表在 IEEE TRANSACTIONS ANALYSIS AND MACHINE INTELLIGENCE 上的论文 A Flexible New Technique for Camera Calibration 中提出了著名的张氏标定法,该方法现在已经成为机器视觉领域的重要基础。虽然现在已经有很多成熟的函数或程序可以非常便…

【MQ笔记】相机标定原理及实现
这是我做的一个简单的关于相机标定的总结PPT,包含简单的原理介绍、标定方法分类和程序实现(Python和MATLAB),请点击查看大图~
peace and love~
双目立体图像矫正方法简述
/**好记性不如烂笔头,将自己之前做的一些工作做一个简单总结**/
在立体视觉中只有当两个相机成像平面完全平行且行对准时,在立体匹配计算立体视差过程中是最简单的,为了使相机两成像平面完全平行且行对准,OpenCV提供了非标定和标…
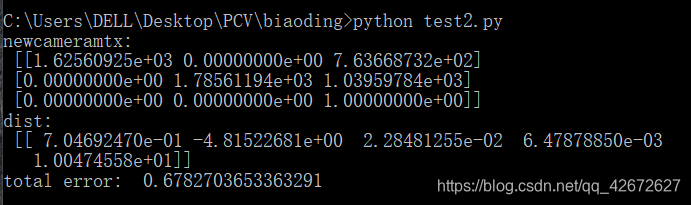
python张正友相机标定法的实现
背景
我们拍摄的物体都处于三维世界坐标系中,而相机拍摄时镜头看到的是三维相机坐标系,成像时三维相机坐标系向二维图像坐标系转换。不同的镜头成像时的转换矩阵不同,同时可能引入失真,标定的作用是近似地估算出转换矩阵和失真系…

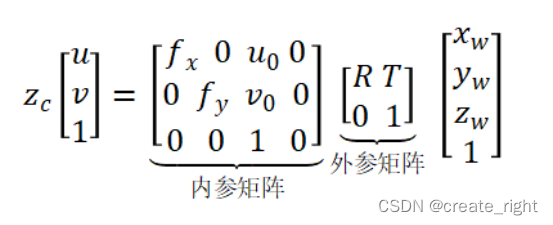
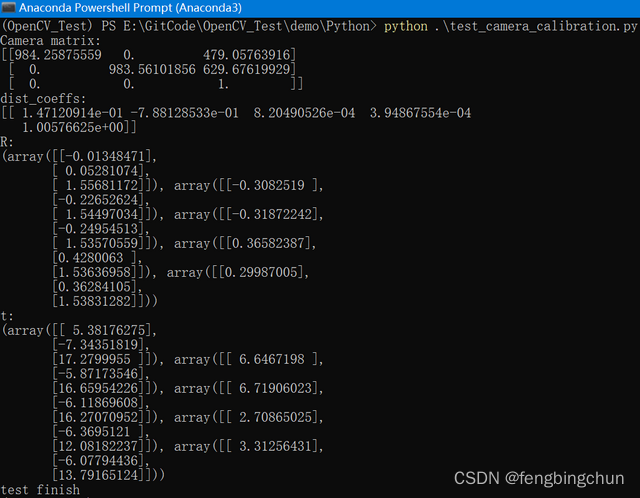
OpenCV中的相机标定
之前在https://blog.csdn.net/fengbingchun/article/details/130039337 中介绍了相机的内参和外参,这里通过OpenCV中的接口实现对内参和外参的求解。 估计相机参数的过程称为相机标定(camera calibration)。相机标定是使用已知的真实世界模式(例如棋盘)来估计…
Android通过OpenCV实现相机标定
在 Android 中使用 OpenCV 实现相机标定,你可以按照以下步骤进行操作: 首先,确保你已经在项目中引入了 OpenCV 库的依赖。 创建一个 CameraCalibrator 类,用于执行相机标定。 import org.opencv.calib3d.Calib3dimport org.open…
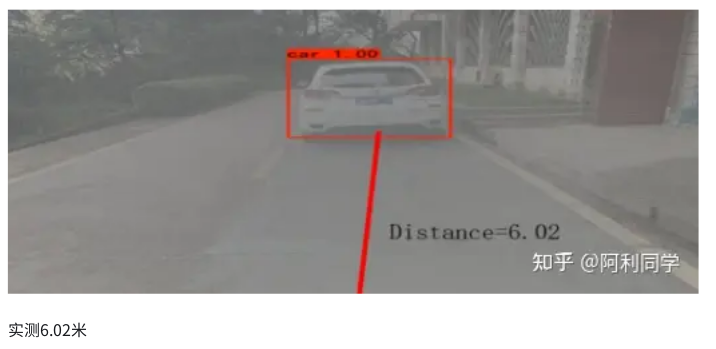
单目测距的基本介绍和实现原理
单目测距的基本介绍和实现原理 单目测距是一种常用的测量技术,它通过单个摄像头来测量物体与摄像头的距离。在现代科技的推动下,单目测距术正在不断发展和应用于各个领域。本文将分点阐述关于单目测距的重要性、原理和方法、应用领域以及潜在的挑战和发展…

ROS相机内参标定详细步骤指南
作者: Herman Ye Galbot Auromix 版本: V1.0 测试环境: Ubuntu20.04 、ROS1 Noetic 更新日期: 2023/09/14 注1: 本文内容中的硬件由 Galbot 提供支持。 注2: Auromix 是一个机器人爱好者开源组织。 注3&…
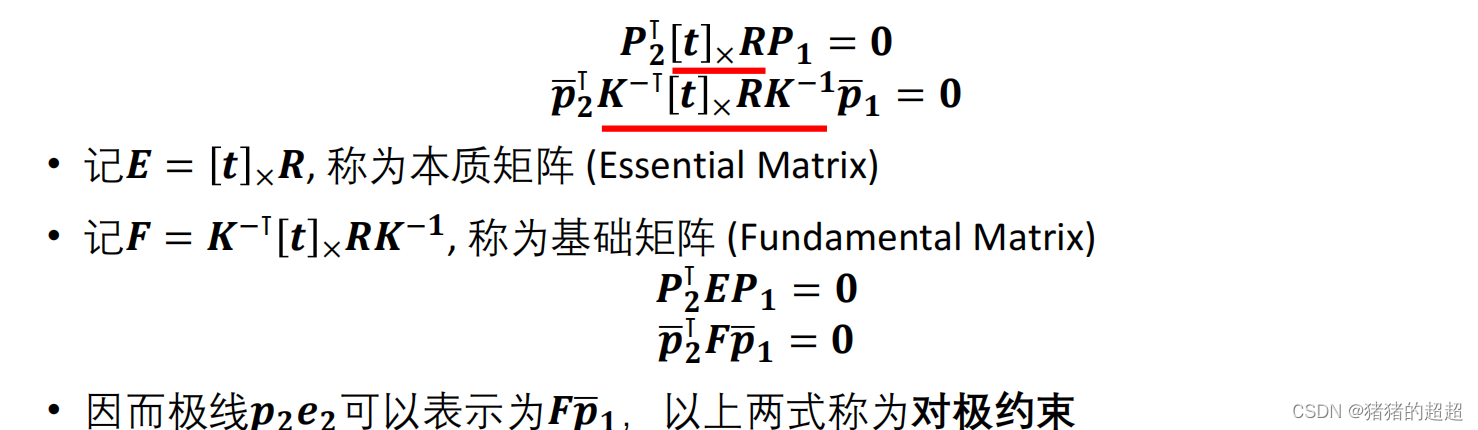
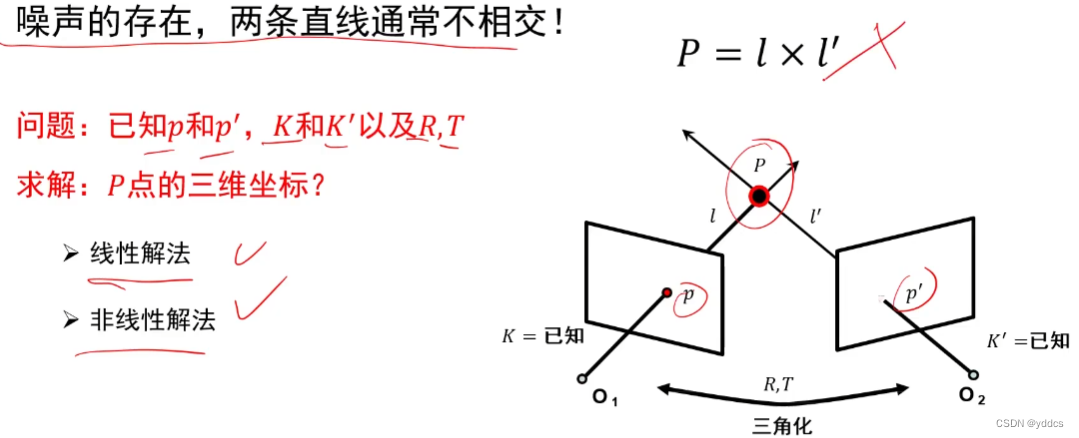
计算机视觉基础(9)——相机标定与对极几何
前言 本节我们将学习相机标定和对极几何两部分的内容。 在相机标定部分,我们将学习直接线性变换(Direct Linear Transform, DL),张正友标定法(Zhang’s Method)和 Perspective-n-Point (PnP) 这三种方法。 在对极几何部…
【小贪】Kinect V2相机标定、图像获取、图像处理(Python)
完整项目链接:GitHub - xfliu1998/kinectProject
Kinect V2相机标定
使用张正友标定法对Kinect V2相机标定。原理及参考代码见以下链接: 单目相机标定实现–张正友标定法:https://blog.csdn.net/weixin_43763292/article/details/128546103…
【3D reconstruction 学习笔记】
三维重建 3D reconstruction 1. 相机几何针孔相机摄像机几何 2. 相机标定线性方程组的解齐次线性方程组的解非线性方程组的最小二乘解透镜相机标定带畸变的相机标定 3. 单视图重建2D平面上的变换3D空间上的变换单视测量无穷远点 无穷远线 无穷远平面影消点 影消线单视重构 4. 三…

基于消失点的相机自标定
基于消失点的相机自标定
附赠最强自动驾驶学习资料:直达链接
相机是通过透视投影变换来将3D场景转换为2D图像。在射影变换中,平行线相交于一点称之为消失点。本文详细介绍了两种利用消失点特性的标定方法。目的是为根据实际应用和初始条件选择合适的标…

深入浅出理解相机标定原理
重要说明:本文从网上资料整理而来,仅记录博主学习相关知识点的过程,侵删。
一、参考资料
微信公众号:计算机视觉life 专栏:#相机标定
Camera Calibration
张正友标定法-完整学习笔记-从原理到实战
二、相机标定相…

OpenCV开发笔记(七十五):相机标定矫正中使用remap重映射进行畸变矫正
若该文为原创文章,转载请注明原文出处 本文章博客地址:https://blog.csdn.net/qq21497936/article/details/136293833 各位读者,知识无穷而人力有穷,要么改需求,要么找专业人士,要么自己研究 红胖子(红模仿…

opencv-python相机标定详解
文章目录 角点检测查看角点标定 opencv中内置了张正友的棋盘格标定法,通过一些姿态各异的棋盘格图像,就能标定相机的内外参数。 角点检测
第一步是角点检测,首先需要读取棋盘格图像
import numpy as np
import cv2
import ospath imgs #…
Matlab工具箱实现张正友相机标定
1. 基本原理 一个二维平面中的棋盘点和一个三维空间内的棋盘点可以表示如下: 它们对应的齐次坐标和可以表示如下: 如果和是同一个点,那么他们的转换关系可以写为: 其中,是任意的比例因子,是外参矩阵&#x…
【MQ笔记】这可能是目前最详细的相机标定坐标转换介绍了~
在我之前的博文 https://blog.csdn.net/qq_45427038/article/details/99672093 里,介绍了计算机视觉系统中涉及到的4种坐标系:图像像素坐标系、图像物理坐标系、相机坐标系和世界坐标系。但是对于这些坐标系之间的转换方式介绍的比较粗略,所以…
相机标定(二)之相机畸变模型
一、相机畸变
定义:相机镜头的畸变实际上是光学透镜固有的透视失真的总称。
相机畸变的分类:
1、枕形畸变:又称鞍形形变,视野中边缘区域的放大率远大于光轴中心区域的放大率,常用在远摄镜头中(下图左&am…

双目视觉测距离(三维重建)
看到好的东西就想转载和大家一起分享一起学习!!!来源:http://blog.csdn.net/tiemaxiaosu/article/details/51734667一、三维重建概述三维重建主要是研究如何从得到的匹配点中计算出相机的投影矩阵(如果是外部标定的话,…
matlab相机标定知识整理
matlab相机标定知识整理 单目相机标定 单目相机标定
内参矩阵:cameraParams.Intrinsics.K 或者 cameraParams.K旋转矩阵:cameraParams.RotationMatrices 有待确定 cameraParams.RotationVectors平移矩阵:cameraParams.TranslationVectors径向…

AprilTag码估算平面法向量+相机标定
由于本人部分原创博客发布在古月居论坛,详细内容点击链接跳转:
1. AprilTag探索和原理分析
2. 相机标定,基于AprilTag估算平面法向量
ROS下安装使用kinect2
使用相机难免少不了标定,ros下有标定kinect深度相机和彩色相机的方法,就在ros下趟一遍坑,特此记录:
1. 安装libfreenect2 libfreenect2为Kinect2提供了一个开源驱动程序,这个驱动并不支持xbox one,.同事也提供了深度图像传输以及RGB图像的联合配准. 安装步骤(我选择安装在ho…

(二)激光线扫描-相机标定
1. 何为相机标定?
当相机拍摄照片时,我们看到的图像通常与我们实际看到的不完全相同。这是由相机镜头引起的,而且发生的频率比我们想象的要高。
这种图像的改变就是我们所说的畸变。一般来说,畸变是指直线在图像中出现弯曲或弯曲。 这种畸变我们可以通过相机标定来进行解…

python张正友相机标定
这里给出我觉得原理解释较清楚的地址,供大家参考: https://blog.csdn.net/u010128736/article/details/52860364 这一篇为张正友标定原版论文的翻译版: https://blog.csdn.net/heroacool/article/details/50286677?tdsourcetags_pctim_aioms…